Cross-location analysis of network disturbances
 -
04. August 2021
-
Digital fault recording
-
04. August 2021
-
Digital fault recording
Cross-location analysis of network disturbances
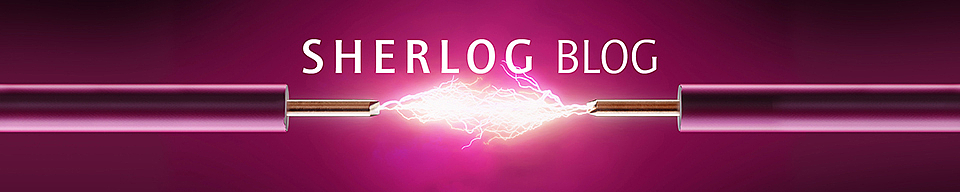
Merging and superimposing disturbance records from different data sources is a common practice in the analysis of network disturbances. For example, the effect of network faults at different locations, even across several voltage levels, can be clearly displayed, evaluated and documented.
The SHERLOG analysis software from KoCoS has mastered this superimposition since the first generation. Thanks to the globally standardized COMTRADE data format for disturbance recordings, the superimposition even works across manufacturers and devices. Thus, recordings from different disturbance recorders, digital protection relays and power quality monitors with disturbance recorder function can be very conveniently and quickly transferred to a common recording.
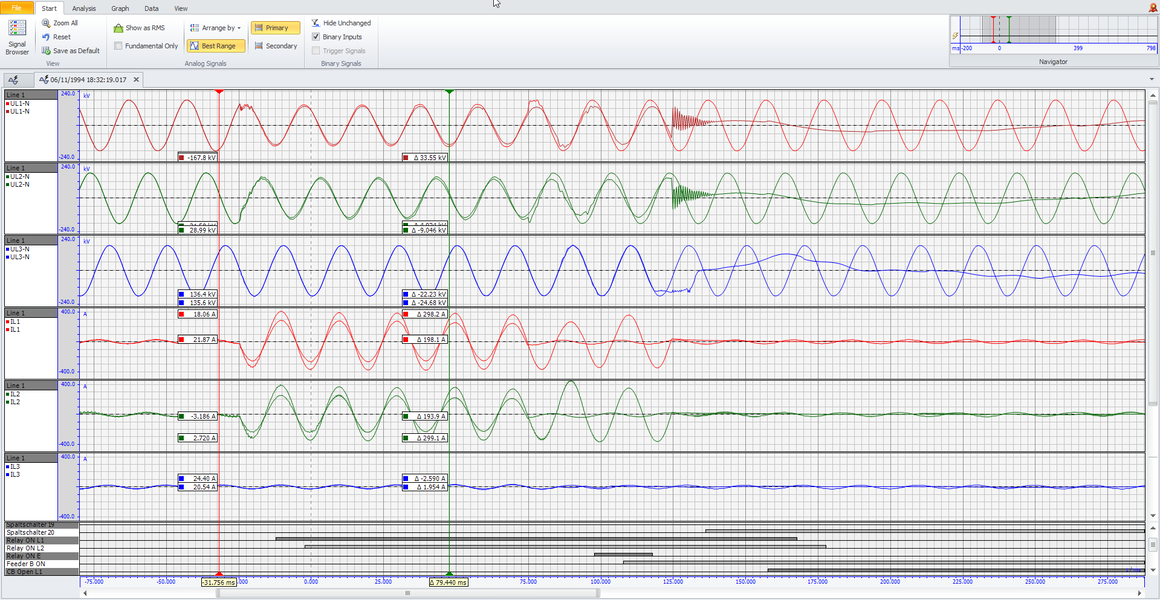
The results of the superposition are as better, as more precisely the individual data sources are time-synchronized. Time deviations result in phase errors. For example, a time deviation of only one millisecond results in a phase error of 18° in 50 Hz networks. In 60 Hz networks even 21.7°.
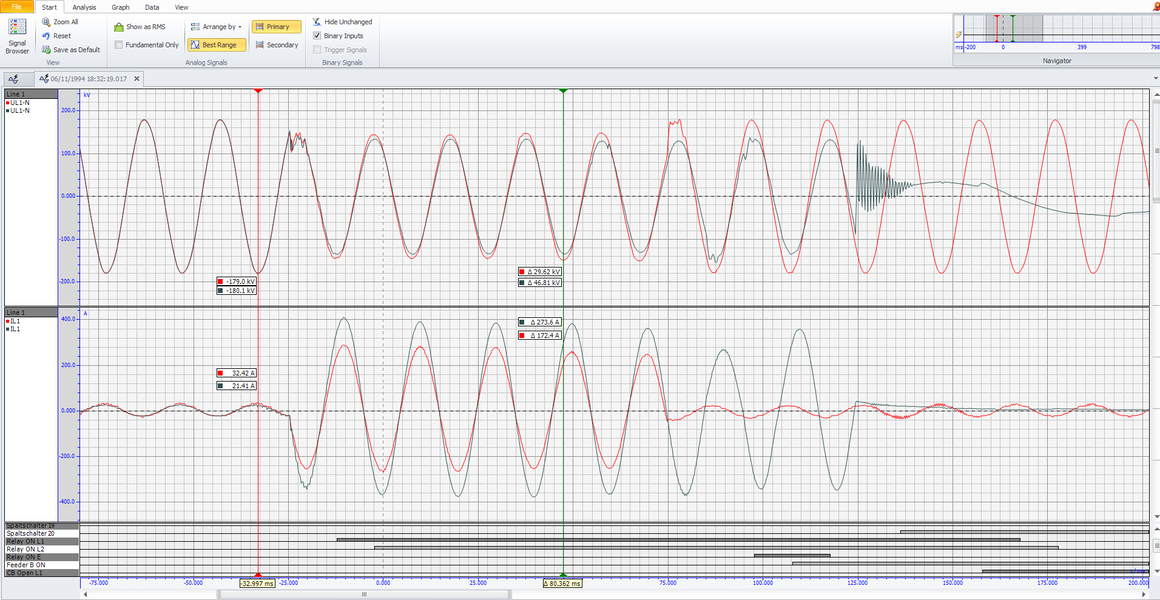
The first choice for disturbance recorder systems with the highest time accuracy requirements is therefore synchronization by means of GPS time telegram and second pulse or alternatively via the communication network by IEEE 1588 /IEC 61588 standard (PTP). The time deviations in these systems are in the nanosecond to microsecond range and thus practically do not generate any phase errors (<0.1°).
However, it is very popular and widespread to realize the time synchronization with GPS time servers, which send the time information via the communication network (LAN) using the NTP protocol. This usually results in deviations of between 0.2 and one millisecond in local networks. In distributed networks (WAN), deviations of up to 10 milliseconds are even possible.
With time synchronization using DCF 77 receivers, deviations of 5 to 15 milliseconds are to be expected.
Basically, it can be stated that the time deviations due to different synchronization methods in practice may well be up to 15 milliseconds. Added to this are even greater deviations due to faulty or completely missing synchronization.
To cope with this situation, KoCoS analysis software offers efficient methods for reliably and quickly compensating for existing time differences between data sources, thus enabling detailed and correct analysis.
Incidentally, the SHERLOG and EPPE measuring systems from KoCoS ensure that time differences between individual devices cannot occur in the first place. The internal GPS receiver or the optical and electrical inputs for connection to external GPS sources synchronize the systems exactly.
But even when using a time source with larger deviations, such as DCF-77 receivers or SNTP, the master-slave principle ensures exact time synchronization between the devices via KoCoS's own interlink interface. Although there may be an absolute time difference due to the accuracy of the time source used, all the devices connected via the interlink interface run absolutely synchronously.
This method ensures perfect overlapping of disturbance records at all times. Even in the event of a total failure of the time source used.
Comments are disabled for this post.
0 comments